
SCANNERII; Protocolos
Desde el 15 de Noviembre del año 2002, AUTOXUGA con ánimo de informar sobre los detalles guardados celosamente por los Fabricantes,
describía en forma sencilla, la manera de construir un HARDWARE al que se llama SCANNER o AUTODIAGNÓSTICO que con solo 10 Euros
ya se podia fabricar. Ese mismo Hardware acompañado del Software y PC lo suelen vender los Fabricantes por 6.000 ó
10.000 Euros. Y también se decía:
Cuando los Clientes se INFORMEN del contenido de este Curso, se supone reclamarán mejores condiciones de COMPRA, ya que en Informática,
cuando se ADQUIERE una simple TARJETA de VIDEO por 10 Euros le entregan un CD con su Software, mientras que al COMPRAR un COCHE por
10.000 ó 40.000 Euros, no se entrega el CD con el Software de la UCE cuyo precio sería de 0,60 Euros, implicando ello que
recomienden ACUDIR a un Taller "de su RED" para conectar el SCANNER en caso de averías y sustituir PIEZAS innecesarias porque así lo
INDICA el APARATO. Y, también decíamos que las Marcas debieran poner en el CUADRO de INSTRUMENTOS un DISPLAY de AVERÍAS cuyo coste
podría rondar los 40 Euros para informar de las averías a sus Clientes, a la vez que hacíamos hincapié en que la FORMACIÓN iba a
ser el PUENTE que acercaría la teoría a la práctica, siendo la INFORMÁTICA de AUTOXUGA lo que ayudaría a ello porque los MEDIOS, decímamos,
sólo aportan un 20%, además de indicar que los parámetros y valores a diagnosticar en el Coche eran "siempre los mismos" y se regían por los
protocolos:
*ISO 9141-2 en vehículos Europeos, Asiáticos y Chrysler con variantes(Key Word Protocol=Palabra Clave)
*SAE J1850 VPW que significa Ancho de Pulso Variable (Variable Pulse Width) y lo utiliza GM USA
*SAE J1850 PWM que indica Modulación Ancho de Pulso (Pulse Width Modulatión) utilizado por Ford USA.
*KWP 1281 y KWP 2000 utilizado por el grupo VAG.
*ISO 14230 que lo utiliza Renault, etc.
El CONECTOR ISO 15031-3 se utiliza con el OBD II (On Board Diagnostics = Diagnóstico de a Bordo) y el EOBD (European on Board
Diagnostics = Diagnóstico de a Bordo Europeo) es de uso obligado desde 1996.
El no informar a los Clientes-Usuarios que compraron sus Coches de los "misterios" electrónicos es algo tan grave como lo
sería el que una persona que se comprara una CASA ó un PISO al estropearsele una cerradura tuviese que acudir "a la fuerza" al
Constructor, y a su vez, éste, al REPRESENTANTE del Fabricante de la cerradura para arreglarsela porque le insertó tal "misterio"
cuyo secreto solo conoce el REPRESENTANTE. Lo anterior, que puede parecer un disparate, está "de moda" en el sector de la Automoción
ya que los Inmovilizadores; Codificación llaves; Radio, etc. se están vendiendo COMO MEJORAS cuando realmente NO LO SON, y debiera
ofrecerse al Cliente la posibilidad de que ESCOGIESE él, y él decidiese, sobre su funcionamiento MANUAL ó AUTOMÁTICO. No obstante y gracias a los
AVANCES de la técnica, algunos Talleres AJENOS al disponer de Programas Informáticos de VANGUARDIA pueden resolver estos temas y
talleres Oficiales de MARCAS NO SABEN HACERLO. Y para despejar dudas sobre lo anterior puede hacerse esta pregunta al Taller:
"¿utiliza o sabe para que sirve un INYECTOR LÓGICO y una SONDA LÓGICA?". Su respuesta aclarará las dudas y se sabrá si se trata de un
simple cambia piezas, cuestión muy extendida hoy en día.
El imponer RESTRICCIONES y cosas misteriosas en los Coches, creemos va a perjudicar los intereses de los constructores de Automóviles en
cuanto los Usuarios se ENTEREN que para reparar una cosa sencilla en su Coche tienen que CONECTARSE desde "el Taller de la
Marca" a su CENTRAL que puede estar en FRANCIA, ALEMANIA, INGLATERRA, etc. porque el Operario del Taller está utilizando el "Maquinillo o Scanner"
como simple peón sin saber lo que hace ya que necesita la conexión via telefónica para hacer la reparación. Por ello,
creemos que las Marcas que estén potenciando estos EXPERIMENTOS no tengan mucho futuro en cuanto los Usuarios conozcan este
truco monopolístico y sean conscientes de que compraron un Automóvil "cautivo" de la Marca ya que si se produce un fallo en su
vehículo y NO FUNCIONA la "línea telefonica" NO SE LO PODRÁN REPARAR. Habrá que esperar a que el teléfono funcione para "empezar"
a trabajar.
Desde AUTOXUGA trataremos de desvelar los "misterios" que según parece tiene hoy en día la Electrónica de los distintos modelos de
Automóviles. Por ello, con ScannerII intentaremos informar sobre esos misterios y cosas raras ó instrumentos misteriosos que recoge
nuestro Programa Informático y que puede verse en nuestra Web de Internet en la sección de SOFTWARE TALLER. Las numerosas consultas que
nos hicieron usuarios, maestros y profesionales de la automoción merece este pequeño esfuerzo que dedicamos a todos ellos a través de este medio.
Interfaces para Scanner

Se presentan TRES distintos Interfaces que tienen ligeras variaciones entre sí, siendo su principal diferencia el que a los
Integrados ó Microcontroladores PIC (que son simples intérpretes de comunicación), debe introducirseles un pequeño y simple Programa que se
encargará de recibir instrucciones del Ordenador para enviarselas a la UCE y, por el contrario, la UCE remitirá sus respuestas al Ordenador. El
Software del PIC mantendrá ACTIVA la comunicación entre Ordenador y UCE. Al Circuíto de la izquierda (simple comunicación bidireccional),
no es necesario ponerle un Cuarzo ya que será el propio Programa del Ordenador el que se encargue de mantener la comunicación. Este último
CIRCUÍTO figura en el Curso sobre SCANNER.
Se recuerda que la Velocidad de transferencia se mide en Baudios:
1 Baudio = 1 bit/seg
Los otros DOS Circuítos (el del centro y el de la derecha) funcionan con Marcas y Modelos de Coches cuya relación se expone más abajo.
Y a modo de recordatorio, se repiten los PROTOCOLOS más utilizados:
*ISO 9141-2 en vehículos Europeos, Asiáticos y Chrysler con variantes(Key Word Protocol=Palabra Clave)
*SAE J1850 VPW que significa Ancho de Pulso Variable (Variable Pulse Width) y lo utiliza GM USA
*SAE J1850 PWM que indica Modulación Ancho de Pulso (Pulse Width Modulatión) utilizado por Ford USA.
*KWP 1281 y KWP 2000 utilizado por el grupo VAG.
*ISO 14230 que lo utiliza Renault, etc.
El CONECTOR ISO 15031-3 se utiliza con el OBD II (On Board Diagnostics = Diagnóstico de a Bordo) y el EOBD (European on
Board Diagnostics = Diagnóstico de a Bordo Europeo) es de uso obligado desde 1996.
Circuito general Scanner

Circuito general de un Scanner y metodo de trabajo
La interface ISO 9141-2 de la figura sirve para diagnosticar muchas Marcas de Coches desde el año 1996 hasta el año 2002 y siguientes, y
los Integrados y Cuarzo que se presenta en el lado derecho pueden emplearse para hacer un Interface que cumpla las exigencias de ISO 9141-2 y
SAE J1850 en sus variantes PWM (Ford) y VPW (GM). Esto se explica para el caso de que se desee utilizar el SCANNER en la
reparación de los Coches, pero si se opta por la CAPACITACIÓN TÉCNICA, entonces, debe conocerse MUY A FONDO como funcionan los
distintos Componentes del Coche.
Al final se explicará como se analizan las SEÑALES que se obtienen con un OSCILOSCOPIO y la ampliación de las mismas para su LECTURA,
dado que el Software del Programa del Ordenador envía a la UCE señales comprendidas entre 250 y los 10.500 baudios, suponiendo ello un obstáculo en
la medición de estas pequeñas magnitudes. Un problema añadido se tiene en los Coches provistos de CAN Bus ya que se trabaja con 90.000 baudios
y su lectura solo puede hacerse con Ordenadores tipo AMD XP; Pentium IV ó superiores.
Se recuerda que la Velocidad de transferencia se mide en Baudios:
1 Baudio = 1 bit/seg
Por todo ello hacemos hincapié en que los Esquemas Eléctricos dasarrollados por AUTOXUGA que figuran en su Programa Informatico de Gestión
Taller (Facturación, Alamacén y Contabilidad), utilizan siempre los mismos conceptos básicos teóricos, al objeto de que los Operarios vayan
adquiriendo FORMACIÓN y conocimientos tecnicos a través de su uso y manejo diario.
Los Esquemas Eléctricos de AUTOXUGA contienen valores de verificación en VOLTIOS u OHMIOS y así el profesional mecánico podrá hacer
controles precisos en los Coches de manera sencilla y directa, pero se recuerda que para verificar cualquier Circuíto Electrónico es
IMPRESCINDIBLE disponer de un Inyector Lógico y Sonda Lógica porque si se aplica un MULTÍMETRO en la escala de Ohmios y
el circuíto está con TENSIÓN, en el 99 por ciento de los casos se deteriorará algún componente electrónico del Circuíto.
Para los que no tienen el Conector OBD
En AUTOXUGA en lugar de utilizar un Conector OBD utilizamos unos simples Cables provistos de unos terminales FASTON que se introducirán
en el Conector OBD del Coche y, por tanto no importa que este tenga el Conector OBD u otro distinto; el tema siempre es el mismo:
Cable de Batería (+) que irá al Pin (16); Cable de Masa (que va al Pin (4) y en algunos casos al Pin (5), y Cable se señal K
(que va al Pin 7). ¡¡Así de sencillo!!.
Software Scanner y normas ISO

Las figuras muestran algunas Pantallas de Softwares y normativa sobre un protocolo ISO. En Internet existen programas de Scanners que pueden
funcionar con el Circuíto de AUTOXUGA dibujado (en plan práctico) en el anterior Curso SCANNER del Automovil y que sirve para
diagnosticar algunas Marcas de Coches. No obstante, no suelen ser muy fiables y se aconsejan los homologados por las Marcas de los Coches, o bien
tener el PROGRAMA de AUTOXUGA que está realizado para FORMAR al PERSONAL y de esta manera se evita acudir a los Scanners en la inmensa
mayoría de los casos.
Si se desea disponer del Sofware en español lo venden a través de la Red y puede localizarse por medio de cualquier Buscador existiendo
versiones del Software básicas/reducidas y otras completas con precios mas elevados.
Protocolos y normas ISO
En la figura (lado superior derecho) se puso la portada de la Norma ISO 7730 (en español) que se refiere a "Ambientes térmicos moderados"
para que se vea como es una NORMA y como suelen presentarse en forma general que está definida por: TÍTULO; CORRESPONDENCIA; OBSERVACIONES
(en este caso no hay) y ANTECEDENTES. Los Protocolos vienen definidos así.
Protocolos; Normas ISO y SAE

En la figura se representa la Portada de una Norma, el Indice y un ANEXO en donde se puede apreciar una forma establecida de
como empieza y termina un documento, así como la manera lógica, pautas y reglas que determinan como debe hacerse algo o qué características debe tener.
Y así como en los Protocolos de Comunicación de los Coches impera una cierta ANARQUÍA, en la fabricación de componentes Electrónicos se trabaja
con mucho más rigor y se pueden estudiar los componentes a través de Internet, en las Web de cada Fabricante.
Los Protocolos en Informática
Son un conjunto de reglas que rigen el intercambio de informaciones entre dos equipos o entre dos sistemas conectados entre sí.
Y casualmente aquí es donde empieza el problema porque el Protocolo ó Norma señala claramente lo que debe de hacerse, pero
no dice "como se debe hacer". Lo que indica el Protocolo ó Norma es por ejemplo que "la Temperatura del Sensor es de 56ºC" pero
NO DICE COMO CONSEGUIR DICHA TEMPERATURA, y por ello, aunque se establezca un Protocolo de Comunicación ISO 9141, para un Modelo de Coche,
en unos Coches puede funcionar y en otros (incluso de la misma marca) NO FUNCIONA y se debe a que los Coches fabricados en un año concreto
siguieron un procedimiento de Comunicación entre Scanner y UCE, y los del año siguiente le adoptaron otro distinto y le hay que introducir
distintos datos a través del Software para que la UCE los reconozaca y devuelva la información que se solicita. Al final
se explica todo esto.
Realmente los Coches montan los mismos SISTEMAS de Inyección o bien éstos se basan en los mismos principios definidos por AUTOXUGA
como MAGNITUDES BÁSICAS porque si fallan, el coche NO ARRANCA, siendo estas Magnitudes: Medidor Caudal de Aire en sus distintas
variantes; Hall ó Sistema de producción de chispa; Captadores Punto Encendido y de nº r.p.m.; otras son
MAGNITUDES DE CORRECCIÓN, las cuales, si fallan, el Coche puede ARRANCAR pero NO RINDE, correspondiendo los:
Sensores Temperatura Líquido Refrigerante; Potenciómetro de Mariposa, etc. y las MAGNITUDES ADICIONALES, por ejemplo:
Sensor de Picado; Sonda ó Sondas Lambda y los distintos Sensores de Presión, Depresión y Altitud.
Las TRES Magnitudes Básicas anteriores son las que dan lugar a tantos nombres en los TIPOS de Inyección. Pues MODIFICANDO simplemente
Valores de RESISTENCIA a unos Sensores, la INYECCIÓN ya suele llamarse de manera distinta. Y lo que hicieron las
MARCAS ó ENSAMBLADORAS de COCHES fue personalizar las INYECCIONES y, por tanto, dos tipos de INYECCIÓN iguales cuyos
FABRICANTES son: Bosch; Magneti-Marelli; Siemens, etc., para un Modelo de una MARCA se puede llamar por UN NOMBRE y en otra MARCA por OTRO.
De esta forma se necesita utilizar un Aparato Diagnóstico (Escaner) distinto; pues variando simplemente la Resistencia NTC de
Temperatura Líquido Refrigerante que para 20 y 80ºC es de 2.500 y 320 Ohmios, y en otra MARCA le ponen valores de 38.000 y 3.400 Ohmios para esos
mismos grados, el "aparato" ya tiene que ser DISTINTO, mientras que las Inyecciones pueden ser iguales. Casi se ha logrado una
Torre de Babel con los NOMBRES de las INYECCIONES, sucediendo algo parecido en Tubos de Escape, que para un mismo Modelo y Versión
se llega al "record" de 26 Referencias DISTINTAS para el mismo bastidor ó plataforma. La FORMACIÓN soluciona toda la anarquía
existente.
Escaneado real en el Taller

Antes de "enchufar" el Maquinillo ó Scanner a un Coche, el Profesional debiera hacer los siguientes CONTROLES de funcionamiento:
PRIMERO: Verificar la velocidad de Giro Motor Arranque, observando el comportamiento de la Batería y su Tensión en Bornes (mín = 11,5v).
SEGUNDO: De confirmarse un OK anterior, y en caso de NO ARRANCAR el Motor, debiera pasarse a la siguiente comprobación:
TERCERO: CHISPA en las Bujias. Para ello, se extrae un Borne de una Bujía y se CONECTA otra BUJÍA a dicho Borne dejándola encima de una
zona metálica del motor (haciendo Masa) para observar el Salto de Chispa. No producir SALTO de CHISPA sin conexión a Masa ya que
puede dañarse el CHIP del ENCENDIDO ELECTRÓNICO que puede ir DENTRO o FUERA de la UCE. De no hacer esto así, el Taller DETERIORÁ la pieza
que pagará el Cliente.
CUARTO: Combustible en INYECTORES; forma del chorro; Corte limpio ó Goteo final. Pero, llegados a este punto, se examinará el estado de las
Bujias y la Porcelana de las mismas: Negruzca, Blanquecina ó Engrasada.
Resultando FAVORABLES los CONTROLES anteriores, pero observándose fallos de funcionamiento en el motor, se pasará a VERIFICAR los Componentes
que ENVIAN ó RECIBEN señales a la UCE. Y para someter a condiciones SEVERAS a dichos Componentes (Sensores; Captadores; Relés;
Bobinas Encendido, etc.), en AUTOXUGA utilizamos un SOPLADOR DE AIRE CALIENTE (un secador del pelo, pero profesional) para "simular" condiciones
de trabajo desfavorables y podemos indicar que en el 95% de los casos resolvemos los problemas satisfactoriamente sin necesidad de "enchufar"
el Scanner.
Se recuerda que la Velocidad de transferencia entre el Ordenador y la UCE se mide en Baudios:
1 Baudio = 1 bit/seg
Para los que no tienen el Conector OBD
En AUTOXUGA en lugar de utilizar un Conector OBD utilizamos unos simples Cables provistos de unos terminales FASTON que se introducirán
en el Conector OBD del Coche y, por tanto no importa que este tenga el Conector OBD u otro distinto; el tema siempre es el mismo:
Cable de Batería (+) que irá al Pin (16); Cable de Masa (que va al Pin (4) y en algunos casos al Pin (5), y Cable se señal K
(que va al Pin 7). ¡¡Así de sencillo!!.
Esquema UCE y relacion Coches

Los Coches con UCEs y Relés Electrónicos al pretender INSPECCIONARLOS se necesita disponer de Inyector Lógico y
Sonda Lógica (u Osciloscopio) para verificar las Señales Digitales que salen por las PATILLAS de los INTEGRADOS y esta
operación es fácil de hacer, pero es necesario conocer el funcionamiento básico de algunos Circuítos Lógicos (Puertas NOR y NAND)
y sus TABLAS de VERDAD, que se encuentran en INTERNET en Webs de FABRICANTES de INTEGRADOS (Philips, Hitachi, Texas Instrument, Goldstar,
NEC, Siemens, Motorola, Intel, etc) y que AUTOXUGA orienta de ello.
***http://www.semiconductors.philips.com/pip/AU5780AD
***http://www.interfacebus.com/Design_Connector_CAN.html
Desconociendo totalmente el FUNCIONAMIENTO de INTEGRADOS, no queda más remedio que inspeccionar las UCEs con APARATOS de DIAGNOSIS que en
muchos casos responden con fallos que no existen ya que muchos fallos se deben a falsas conexiones o deficientes Masas. Las
Marcas de Coches que leen los SCANNER que hemos descrito antes, excepto el KWP 1281/2000 adoptadodo por el Grupo VAG se
ponen a continuación con referencias al Modelo; Año y Protocolo que utilizan:
Acura MDX 2003 ISO
Acura RSX Type-S 2002 ISO
Audi A4 1998 ISO
Audi A4 2001 ISO
Audi A6 1998 ISO
Audi Cabriolet 1997 ISO
BMW 316i 2003 ISO
BMW 318ti 1998 ISO
BMW 320 2002 ISO
Buick Rivera 1998 VPW
Cadillac Deville 2000 VPW
Chevrolet Blazer 1995 VPW
Chevrolet Camaro SS 2000 VPW
Chevrolet Camaro Z28 1997 ISO
Chevrolet Camaro Z28 1998 VPW
Chevrolet Caprice 1996 VPW
Chevrolet Cavalier 1996 VPW
Chevrolet Cavalier 1998 VPW
Chevrolet Cavalier Z24 1999 VPW
Chevrolet Impala 2000 VPW
Chevrolet Lumina 1996 VPW
Chevrolet Malibu 1998 VPW
Chevrolet S10 2000 VPW
Chevrolet Silverado 1998 VPW
Chevrolet Silverado 2002 VPW
Chevrolet Tahoe 1996 VPW
Chevrolet Venture 1998 VPW
Chrysler Town & Country Van 1996 ISO
Chrysler Voyager 1995 ISO
Citroen Xsara 1999 ISO
Citroen Xsara Picasso 2000 ISO
Citroen Xsara VRT 2000 ISO
Dodge Caravan 1997 ISO
Dodge Dakota 2001 ISO
Dodge Neon 1995 ISO
Dodge RAM 1500 1999 ISO
Dodge RAM 2500 1999 ISO
Dodge Stratus 1996 ISO
Dodge Stratus 1997 ISO
Fiat Punto 2002 ISO
Ford Contour 1999 PWM
Ford Escort 1998 PWM
Ford Expedition 1998 PWM
Ford Explorer 1998 PWM
Ford Explorer 2000 PWM
Ford E150 2000 PWM
Ford E350 2000 PWM
Ford F150 1997 PWM
Ford F150 (truck) 1999 PWM
Ford F150 (van) 1999 PWM
Ford F150 2003 PWM
Ford F250 2000 PWM
Ford F250 (Australian) 2002 PWM
Ford Focus 1999 PWM
Ford Focus (UK) 2001 PWM
Ford Focus 2002 PWM
Ford Focus SVT 2002 PWM
Ford Mustang 1998 PWM
Ford Mustang 2001 PWM
Ford Probe 1997 ISO
Ford Ranger 1995 PWM
Ford Ranger 1996 PWM
Ford Ranger 1998 PWM
Ford Ranger 2002 PWM
Ford Taurus 1996 PWM
Ford Taurus 2001 PWM
Ford Thunderbird LX 1997 PWM
Ford Windstar 1995 PWM
Ford Windstar 1997 PWM
GMC Jimmy 1999 VPW
GMC Lumina 2001 VPW
Honda Accord 1998 ISO
Honda Accord 2000 ISO
Honda Civic 1996 ISO
Honda Civic 1997 ISO
Honda Civic 2001 ISO
Honda Civic 2002 ISO
Honda Odyssey 2002 ISO
Honda S2000 2000 ISO
Hyundai Accent 1998 ISO
Hyundai Elantra 1996 ISO
Hyundai Elantra 2001 ISO
Hyundai Tiburon 1997 ISO
Isuzu Trooper 1998 VPW
Jeep Grand Cherokee 1996 ISO
Jeep Grand Cherokee 1997 ISO
Jeep Grand Cherokee 1998 ISO
Jeep Grand Cherokee 1999 ISO
Jeep Liberty 2002 ISO
Jeep Liberty 2003 VPW
Kia Sephia 1999 ISO
Kia Spectra 2001 ISO
Mazda Protege 2001 ISO
Mazda Protege 5 2002 ISO
Mazda Tribute 2002 PWM
Mini Cooper 2002 ISO
Mitsubishi Eclipse 1997 ISO
Mitsubishi Lancer 1999 ISO
Mitsubishi Mirage 1999 ISO
Mitsubishi Montero 1995 ISO
Mercury Cougar 2000 PWM
Mercury Grand Marquis 1998 PWM
Mercury Sable 1996 PWM
Mercedes-Benz C200 Kompressor 2003 ISO
Mercedes-Benz C230 2000 ISO
Nissan Altima 1999 ISO
Nissan Altima GXE 1997 ISO
Nissan Frontier 1999 ISO
Nissan Maxima 1996 ISO
Nissan Maxima GLE 1999 ISO
Nissan Micra 2003 ISO
Nissan Pathfinder 2002 ISO
Nissan Primera 1999 ISO
Nissan Sentra 2001 ISO
Nissan Sentra SE-R 2002 ISO
Nissan Sentra SpecV 2003 ISO
Nissan Terrano 1997 ISO
Oldsmobile Cutlass Supreme 1996 VPW
Oldsmobile Intrigue 1999 VPW
Oldsmobile Silhouette 1998 VPW
Opel Astra 2001 ISO
Opel Frontera 1999 ISO
Opel Vectra 1998 ISO
Opel Vectra 2001 ISO
Opel Zafira (diesel) 2002 ISO
Peugeot 106 1998 ISO
Peugeot 106 2003 ISO
Peugeot 206 GTi 2002 ISO
Peugeot 406 HDi 1999 ISO
Pontiac Aztec 2001 VPW
Pontiac Bonneville 1997 VPW
Pontiac Grand Am 1996 VPW
Pontiac Grand Am 2000 VPW
Pontiac Grand Prix 2000 VPW
Pontiac Grand Prix 2001 VPW
Pontiac Sunfire 1997 VPW
Pontiac Transport 1998 VPW
Renault Clio 2001 ISO
Renault Megane 2000 ISO
Saturn SL 1996 VPW
Saturn SL1 1996 VPW
Seat Cordoba Vario TDI 2000 ISO
Skoda Octavia 2002 ISO
Subaru Impreza WRX 2002 ISO
Subaru Impreza WRX 2003 ISO
Subaru Outback Wagon 2002 ISO
Suzuki Sidekick 1997 ISO
Suzuki Vitara 1997 ISO
Toyota Camry 2002 ISO
Toyota Celica GT-S 2000 ISO
Toyota Corolla (European) 2002 ISO
Toyota Solara 1999 ISO
Toyota Solara LE 2000 ISO
Toyota Tacoma 2000 ISO
Toyota Tacoma 2002 ISO
Toyota Yaris 2000 ISO
Volkswagen Beetle 2000 ISO
Volkswagen Bora 1999 ISO
Volkswagen Eurovan Camper 1997 ISO
Volkswagen Golf 1997 ISO
Volkswagen Golf 2001 ISO
Volkswagen Jetta 1997 ISO
Volkswagen Jetta 2002 ISO
Volkswagen Passat 1996 ISO
Volkswagen Passat 1997 ISO
Volkswagen Passat 1999 ISO
Volkswagen Passat 2003 ISO
Volkswagen Sharan 1998 ISO
Volvo 850 T5 1997 ISO
Volvo S60 2001 ISO
Volvo S70 1999 ISO
Volvo S80 T6 1999 ISO
Volvo 850 Turbo 1996 ISO
Volvo V70 BiFuel 2002 ISO
Los Coches con Sistema MULTIPLEXADO y tecnología CAN bus (Controller Area Network a través de buses ó Control de Area en Red para la
transferencia de datos) necesita de unos Componentes definidos en la ISO 11898/11519 por utilizar otros PROTOCOLOS (reglas de Transmisión y Recepción).
Los CIRCUITOS ELECTRONICOS contienen una serie de Integrados y, tanto en unos casos como en otros, sería DESEABLE que se conociera el
FUNCIONAMIENTO de los Circuítos Digitales en el supuesto de hacerles una verificación y eventual reparación si fuera necesario, pero debe disponerse
de un Inyector Lógico y Sonda Lógica para comprobar los Integrados sin desmontarlos del Circuito o Placa en donde van soldados
ya que este Aparato INYECTA una señal al Circuito sin necesidad de sacarlos de la Placa.
Inyector Logico y Sonda Logica

Al explicar en AUTOXUGA los principios de los MICROPROCESADORES se indica que los MULTÍMETROS del Taller debieran poder medir
ONDAS CUADRADAS, pero se hace hincapié en que deben utilizarse "a la vez" SONDAS LÓGICAS e INYECTORES LÓGICOS cuyo precio suele
ser de 25 Euros. Damos esta orientación de precios por muchos "e-mail" recibidos pidiendo información, ya que está muy extendido
que sin APARATOS CAROS y COMPLEJOS de Diagnosis no deben tocarse los Sistemas Electrónicos y esto no es cierto.
La SEÑAL que genera el Inyector Lógico es de unos 100 mA y tiene una duración de 10 µs para evitar dañar al Circuito bajo prueba.
La Salida de la Señal puede conmutarse a 0,5 Hz ó 400 Hz, lo cual resulta muy útil para efectuar comprobaciones con una
Sonda Lógica, o mejor aun con un Osciloscopio ya que de esta manera se puede precisar con detalle la frecuencia y forma de las
Señales Digitales (Pulsantes y bien 0Vcc y Vcc) expresadas en Voltios ó milivoltios como las representadas abajo en
función del tiempo.
Ayudas para un DIAGNOSTICO elemental
En caso de AVERÍA de algún Transmisor IMPORTANTE (Temperatura, etc.), la UCE envía un Momento de Encendido de EMERGENCIA
(unos 5º antes del P.M.S) para que el coche pueda acudir a un Taller a reparar el fallo.
*Si falla el Transmisor HALL, la UCE no recibe r.p.m. y el motor no arranca.
*Con avería en Sensor Aspiración, se percibe que el coche consume mucho.
*Derivado a masa el Sensor Temperatura, la UCE recibe -10ºC, y da tirones.
***Sensores Picado; Sonda Lambda; Caudalímetro, etc. dan otros distintos fallos que debe conocer el Profesional.
LAS REPARACIONES CON ÉXITO SE HARÁN CONOCIENDO FUNCIONAMIENTO DE SENSORES. No basta con el chequeo del Escaner que viene a ser
como el TERMÓMETRO para las enfermedades. Un Médico cura por sus conocimientos.
En las Webs que muestra AUTOXUGA y en otras muchas puede obtenerse información precisa sobre el funcionamiento de los Integrados:
***www.fairchildsemi.com/ds/LM/LM2901.pdf
***www-us6.semiconductors.com/acrobat/datasheets/LM139X_2.pdf
Can bus en el Automovil
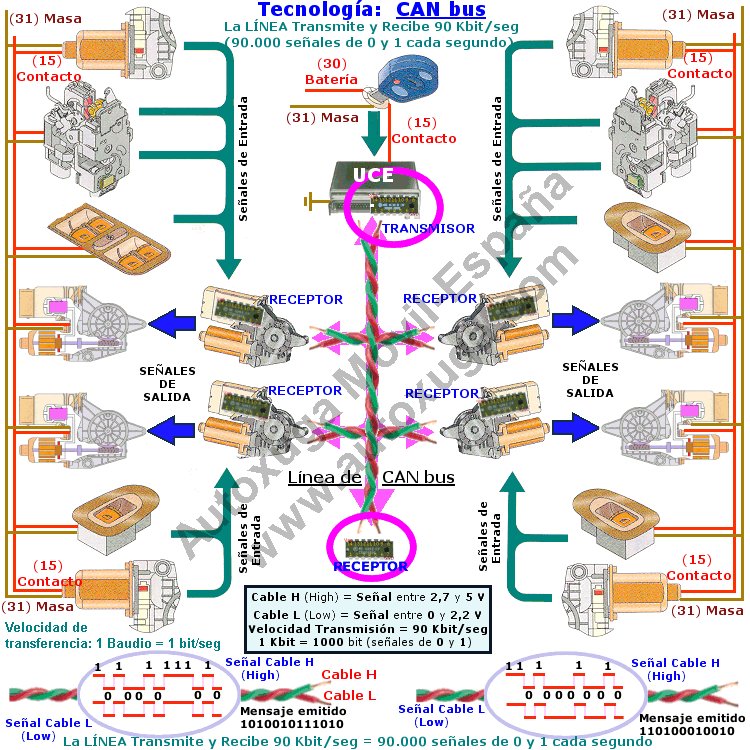
Dependiendo de los Fabricantes de Circuítos Electrónicos: Bosch; Siemens; Intel;
***http://www.infineon.com/search/pdf/sae81c52.pdf
Como complemento diremos que en los ORDENADORES, el RATÓN y TECLADO conducen señales en SERIE (bit a bit) y transmiten
por ejemplo 8 bits (uno detrás de otro: 0-1-1-1-0-0-1-0), mientras que la IMPRESORA, CD-ROM y DISCO DURO realizan la transmisión en
PARALELO (8 cables) y cada cable transmite UN bit conjunta y simultámeamente: (0)-(1)-(1)-(1)-(0)-(0)-(1)-(0), llegando todos los bit a
la vez y siendo mucho MÁS RÁPIDA la transmisión. Recordamos que 8 bit = 1 byte = una letra y también que la Velocidad de transferencia
entre Ordenador y UCE se mide en Baudios:
1 Baudio = 1 bit/seg
Puertos comunicación SERIE y PARALELO
En la comunicación SERIE entre Ordenador y UCE del Coche, se realiza normalmente por UN SOLO HILO (o puede haber DOS) y las Tensiones de
trabajo van de +15v a -15v enviandose 1 bit detrás de otro, siendo la COMUNICACIÓN bidireccional. Ejemplo: Una
Carretera en obras en la que se pone un Semáforo para regular el paso de los Coches hacia un lado y otro.
La comunicación en PARALELO se produce con Tensiones de trabajo que van de +5v a 0v, siendo la comunicación en un solo
sentido y de 8 bit a la vez. 8 bit = 1 byte y cada byte viene a ser una letra (a, e, i,...) del Código normalizado ASCII.
Si por ERROR se conecta la UCE del Coche(+12v) al Puerto PARALELO del Ordenador(+5v), en el mejor de los casos no se
produce comunicación, pero casi queda asegurado el DETERIORO la Placa Base del Ordenador.
Los bits pueden enviarse por los HILOS ó LÍNEA controlada por un reloj (Cuarzo) a INTERVALOS REGULARES que en el ámbito ELÉCTRICO se
conoce como nivel ALTO (High) ó BAJO (Low) a través de un protocolo ó convenio sobre el inicio y fin de la
transmisión, es decir; se debe indicar la forma del comienzo y finalización de las SEÑALES transmitidas.
Se llama BUS a un conjunto de Hilos homogéneos en donde el ANCHO del bus indica el nº de hilos o bits (8, 16, etc) pudiendo
transportar un bus de 16 bits (16 hilos) 65.536 combinaciones distintas.
En algunos casos, el BUS puede funcionar variandolo FRECUENCIA y PERMISO (Enable), haciendo que se ACTIVE, DESCONECTE,
o quede en ESPERA (alta impedancia) la CONEXIÓN y ENVÍO de señales desde la UCE al Dispositivo.
Osciloscopio Digital
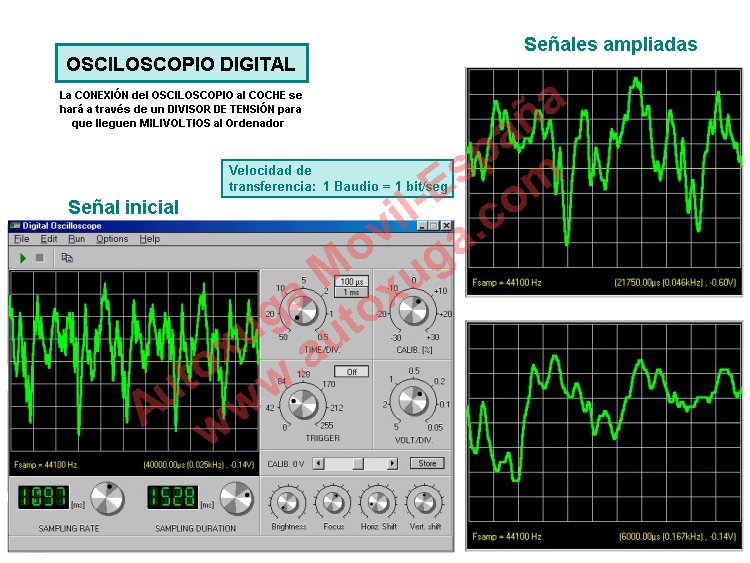
En AUTOXUGA utilizamos el ORDENADOR como OSCILOSCOPIO porque de esta manera disponemos de un equipo con el PROGRAMA de GESTIÓN,
TECNICO y OSCILOSCOPIO. Lo único que debe hacerse es un Circuíto con unas Resistencias para que actúen de DIVISOR DE TENSIÓN para que la
medidas de los 12v del Coche se conviertan en unos pocos Milivoltios en el Ordenador.
Se recuerda que la Velocidad de transferencia entre Ordenador y UCE se mide en Baudios:
1 Baudio = 1 bit/seg
Medida de señales: Caso de INMOVILIZADORES y UCEs
Con el ORDENADOR es posible PARAR una SEÑAL y amplificarla según nuestra conveniencia para después analizarla. Lógicamente el
estudio de señales puede hacerse con un ANALIZADOR LÓGICO de 40 ó 50 CANALES, pero su precio está por encima de los 3.000 euros, lo que lo sitúa
fuera del alcance de los Talleres y, además, solo sirve para analizar señales en el caso que deseemos hacer un Circuíto Electrónico que emita
esas señales.
Usando el ORDENADOR como OSCILOSCOPIO o bien un ANALIZADOR LÓGICO pueden medirse las señales que introduce un APARATO DE DIAGNÓSTICO
(Scanner) en la UCE de un Coche y ver las señales que devuelve la UCE.
La medición de señales que envía un INMOVILIZADOR a la UCE también se hace con cualquiera de estos dos medios.
Inmovilizadores: Analisis de Señales

Un circuíto que deseemos suplante a un INMOVILIZADOR se hace con el siguiente material:
*Regulador de Tensión de 12 a 5v.
*Integrado de Multiplexado.
*Integrado 555 ó bien un Cuarzo (según complejidad del Circuíto).
*Integrado ó Chip de Memoria.
Se pondrán los correspondientes Condensadores y Resistencias que necesite cada INTEGRADO, y en función de quien sea su Fabricante, se podrán ver
los valores de estos elementos en archivos PDF de cada Web institucional de cada Fabricante de INTEGRADOS.
Con el ORDENADOR haciendo las funciones de OSCILOSCOPIO DIGITAL se capturan y amplifican las señales para estudiarlas de manera
similar a como se indica en la figura de la parte inferior. Solo es necesario tener en cuenta si los IMPULSOS ELECTRICOS se van aplicar a un
Circuíto CMOS ó TTL, pero como primer paso se hace el ensayo teniendo en cuenta todas las señales.
A continuación se agrupan las SEÑALES en Bytes (grupos de 8 impulsos) para su lectura e interpretación y cuyo desarrollo de cálculo
figura en el dibujo. Y si por comodidad no queremos hacer esos sencillos cálculos podemos recurrir a la CALCULADORA de Windows
a través de: Inicio--Programas--Accesorios--Calculadora y seleccionando Bin se introducen los impulsos en Código Binario (10101101),
lo cual al marcar Dec se obtiene 173 o si se marca Hex se tiene AD. Haciendo esto al revés o introduciendo un número
pueden obtenerse los bit (0 y 1 correspondientes).
Comunicación del Ordenador con la UCE
Al introducir en el ORDENADOR números tales como 33, 55, 01, 02, etc., a la UCE llegarán impulsos de 0 ó 1
porque el Software ó Programa así lo hace ya que convierte los NÚMEROS en Códigos Máquina para su interpretación. Los ejemplos que se ponen
a continuación consisten en pasar de Decimales a Hexadecimales y finalmente a Código Binario que pueden hacerse en la
CALCULADORA de Windows porque el Ordenador simplemente hace:
*escribir 33 en Dec = 21 Hex = 100001 Bin que recibe la UCE
*escribir 60 en Dec = 3C Hex = 111100 Bin que recibe la UCE
*escribir 63 en Dec = 3F Hex = 111111 Bin que recibe la UCE
*escribir 80 en Dec = 50 Hex = 1010000 Bin que recibe la UCE
*escribir 84 en Dec = 54 Hex = 1010100 Bin que recibe la UCE
Los datos en Decimal ó Hexadecimal que se hayan seleccionado a priori para el RASTREO DE SEÑALES se introducen en el PROGRAMA
de AUTOXUGA, y la UCE, el INMOVILIZADOR o el APARATO que estudiemos, devolverá datos en Decimal o en Hexadecimal
según el Software que le hayan introducido en diseño y según Norma o Protocolo que previamente le establecieron.
Finalmente, el PROGRAMA de Autoxuga SIMULARÁ en la UCE las señales que se están estudiando SUPLANTANDO al INMOVILIZADOR ó UCE,
observándose las respuestas de estos COMPONENTES y de esta manera no es necesario construir un Circuíto hasta que los resultados sean POSITIVOS
y emitan una cadena de números o letras CORRECTAS (en el caso del INMOVILIZADOR, esta cadena será el que arranque el Coche).
Finalmente se pasan los datos a Código Binario de (0 y 1) según lo dicho anteriormente, y se hace el Circuíto que emita y SIMULE
las señales obtenidas a través del Programa.